Testing Components and Configuration
Author: Dr. Michael Zimmer
___________________________________________________________________________________
Unmanned Aerial Vehicle (UAV) is an Unmanned Aerial System (UAS) component type that can be assembled in various configurations (Granshaw, 2018). Embry-Riddle Aeronautical University’s Hub offer labs to explore a multitude of UAS platforms while examining its real-world capabilities. This exploratory paper will provide a Dynamic and Power Plant Lab observational review while discussing elective elements of each lab through literature review. In addition, this paper will analyze two types of UAS configuration, its capabilities, and usage.
Dynamics Lab
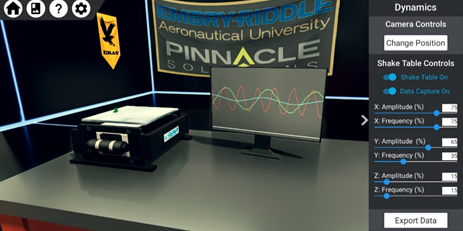
A dynamics lab setup as labs are equipped with a multi-axis shake table along with accelerometer. Shake tables test is a common technique used to capture a UAS structural performance. Linear force was performed to determine UAS response. Based on provided tutorial inputs, a balanced reading was captured. Readings from exportable data found that the inputted data evenly scaled waves. When wave readings are unbalanced and structure exceed dynamic limits, design changes are necessary for improved performance.
Accelerometers are used to aid in the
performance of UAS designs. Accelerometers are available in multiple variations
as single, multiple, and inertial measurement unit (IMU) axes. Single-axis,
provides a maximum one directional reading while signaling no output readings
on other axes. Multi-axis, measures gravitational acceleration as readings can
determine the angle of tilt. In addition, multi-axis accelerometer is able to
determine directional speed by sensing structural dynamic acceleration (Likos
et al., 2021). Last, intergraded IMU improves UAS navigation through enhanced
stability and control capabilities.
Power Plant Lab

Power Plant labs are equipped with a motor reading tool that measured motor performance. In addition, the lab allowed for the selection of either an internal combustion or electric motor. Based on the provided tutorial motor inputs, the internal combustion outputted superior results in terms of power compared to an electric motor.
Unmanned Aerial System motor features differ and are often selected based on UAS design. Unmanned Aerial System motors are available in many variations as brushed, brushless, and two-stroke will be lightly explored. Most modern remote aircrafts are powered by a battery source; thus, the uses of electric motors are common. Electric motors (brushed and brushless) have found to be simpler and more efficient compare to combustion motors (two-stroke), yet lacks payload and low energy density of travel. Brushed motors frequently power industrial equipment and requires more maintenance compared to brushless motors as brushless motors serve speed controller devices (Lefebvre, 2007). In addition, brushless motors are a more modern motor that holds a higher efficiency, lower susceptibility, while complementing current technological applications. Combustion motors such as two-stroke motors are lighter compared to other combustion motors and can be seen as a simple and universal motor that can be retrofittable into any vehicle. When comparing two-stroke with brushless motors, expect higher vibrations, noise, and routine checks (Crosbie et al., 2014). When designing a UAS, needs and wants will often align with either an electric or combustion motor.
UAS Configuration

An octorotor airframe powered by brushless motors through Li-Po batteries serves an entry-professional market (i.e. photography, structural surveying, hobbyist, etc.). Figure 4 configuration mirrors the DJI Matrice 600 with a supported third-party gimbal camera payload (similar to a GoPro). In addition, GPS, dipole antenna, and IMU have been added to align with a basic Matrice 600 assembly. The Assembly Lab outputted a weight excess of 9800g with an endurance of 15 minutes of flight. Last, the ground control station (GSU) communicates with the octorotor through a hand-held remote control. Although remote control specification is not noted within the Assembly Lab, communication range reflects 1000 meters; thus, in range using a frequency of 5ghz. If the Assembly Lab offered the latest dual-band hand-held remote control (2.4 and 5ghz) technology, communication range can reach 7000 meters.

A fixed-wing airframe powered by a two-stroke motor using gasoline serves military and commercial markets (i.e. intelligence, surveillance, reconnaissance, etc.). Figure 5 configuration mirrors Textron Systems’ Shadow. In addition, a generator, auto control system, GPS, dipole antenna, radar, camera and battery pack to operate electronics have been added to align with a basic Shadow assembly. The Assembly Lab outputted a weight excess of 3800g with an endurance of 126 minutes of flight. Last, the ground control station (GSU) communicates with the fixed-wing from a trailer using a dish antenna. Although the Assembly Lab, communication range reflects 4900 meters, yet Textron System claims that the Shadow has a visual line of sight range of 125,000 meters. This is possible with the latest long-range antenna technology.
Crosbie, S. C., Polanka, M. D., Litke, P. J., & Hoke, J.
L. (2014). Increasing reliability of a two-stroke internal combustion engine
for dynamically changing altitudes. Journal of Propulsion and Power, 30(1),
87-95. doi:10.2514/1.B34753
Granshaw, S. I. (2018). RPV, UAV, UAS, RPAS … or just drone?
Photogrammetric Record, 33(162), 160-170. doi:10.1111/phor.12244
Lefebvre, M. (2007). Brush or brushless motors? Medical
Design, 7(6), 32.
Likos, W. J., Zayed, M., Ebeido, A., Prabhakaran, A., Kim,
K., Qiu, Z., & Elgamal, A. (2021). Shake table testing: A high-resolution
vertical accelerometer array for tracking shear wave velocity. Geotechnical
Testing Journal, 44(4), 1-22. doi:10.1520/GTJ20190066


